SLOS073G March 1976 – November 2014 RC4558
PRODUCTION DATA.
- 1 Features
- 2 Applications
- 3 Description
- 4 Revision History
- 5 Pin Configuration and Functions
- 6 Specifications
- 7 Detailed Description
- 8 Application and Implementation
- 9 Power Supply Recommendations
- 10Layout
- 11Device and Documentation Support
- 12Mechanical, Packaging, and Orderable Information
Package Options
Refer to the PDF data sheet for device specific package drawings
Mechanical Data (Package|Pins)
- D|8
- P|8
- DGK|8
- PS|8
- PW|8
Thermal pad, mechanical data (Package|Pins)
Orderable Information
8 Application and Implementation
NOTE
Information in the following applications sections is not part of the TI component specification, and TI does not warrant its accuracy or completeness. TI’s customers are responsible for determining suitability of components for their purposes. Customers should validate and test their design implementation to confirm system functionality.
8.1 Typical Application
Some applications require differential signals. Figure 14 shows a simple circuit to convert a single-ended input of 2 V to 10 V into differential output of ±8 V on a single 15-V supply. The output range is intentionally limited to maximize linearity. The circuit is composed of two amplifiers. One amplifier acts as a buffer and creates a voltage, VOUT+. The second amplifier inverts the input and adds a reference voltage to generate VOUT–. Both VOUT+ and VOUT– range from 2 V to 10 V. The difference, VDIFF, is the difference between VOUT+ and VOUT–.
 Figure 14. Schematic for Single-Ended Input to Differential Output Conversion
Figure 14. Schematic for Single-Ended Input to Differential Output Conversion
8.1.1 Design Requirements
The design requirements are as follows:
- Supply voltage: 15 V
- Reference voltage: 12V
- Input: 2 V to 10 V
- Output differential: ±8 V
8.1.2 Detailed Design Procedure
The circuit in Figure 14 takes a single-ended input signal, VIN, and generates two output signals, VOUT+ and VOUT– using two amplifiers and a reference voltage, VREF. VOUT+ is the output of the first amplifier and is a buffered version of the input signal, VIN (see Equation 1). VOUT– is the output of the second amplifier which uses VREF to add an offset voltage to VIN and feedback to add inverting gain. The transfer function for VOUT– is Equation 2.

The differential output signal, VDIFF, is the difference between the two single-ended output signals, VOUT+ and VOUT–. Equation 3 shows the transfer function for VDIFF. By applying the conditions that R1 = R2 and R3 = R4, the transfer function is simplified into Equation 6. Using this configuration, the maximum input signal is equal to the reference voltage and the maximum output of each amplifier is equal to the VREF. The differential output range is 2×VREF. Furthermore, the common mode voltage will be one half of VREF (see Equation 7).

8.1.2.1 Amplifier Selection
Linearity over the input range is key for good dc accuracy. The common mode input range and the output swing limitations determine the linearity. In general, an amplifier with rail-to-rail input and output swing is required. Bandwidth is a key concern for this design. Because RC4558 has a bandwidth of 3 MHz, this circuit will only be able to process signals with frequencies of less than 3 MHz.
8.1.2.2 Passive Component Selection
Because the transfer function of VOUT– is heavily reliant on resistors (R1, R2, R3, and R4), use resistors with low tolerances to maximize performance and minimize error. This design used resistors with resistance values of
36 kΩ with tolerances measured to be within 2%. But, if the noise of the system is a key parameter, the user can select smaller resistance values (6 kΩ or lower) to keep the overall system noise low. This ensures that the noise from the resistors is lower than the amplifier noise.
8.1.3 Application Curves
The measured transfer functions in Figure 15, Figure 16, and Figure 17 were generated by sweeping the input voltage from 0 V to 12 V. However, this design should only be used between 2 V and 10 V for optimum linearity.
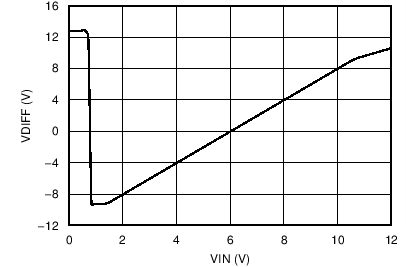 Figure 15. Differential Output Voltage Node vs Input Voltage
Figure 15. Differential Output Voltage Node vs Input Voltage
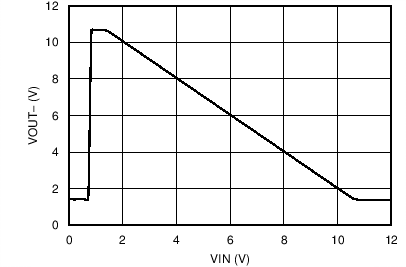 Figure 17. Positive Output Voltage Node vs Input Voltage
Figure 17. Positive Output Voltage Node vs Input Voltage
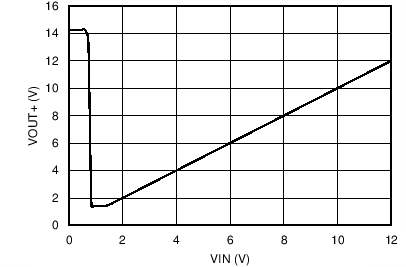 Figure 16. Positive Output Voltage Node vs Input Voltage
Figure 16. Positive Output Voltage Node vs Input Voltage