SSZTA30 June 2017 TMS320F28379D
TI’s expertise in real-time control architectures and experience with industrial drive control systems over the last 20 years has led to many cycle scavenging enhancements to its C2000™ family of real-time microcontrollers (MCUs) and corresponding software solutions.
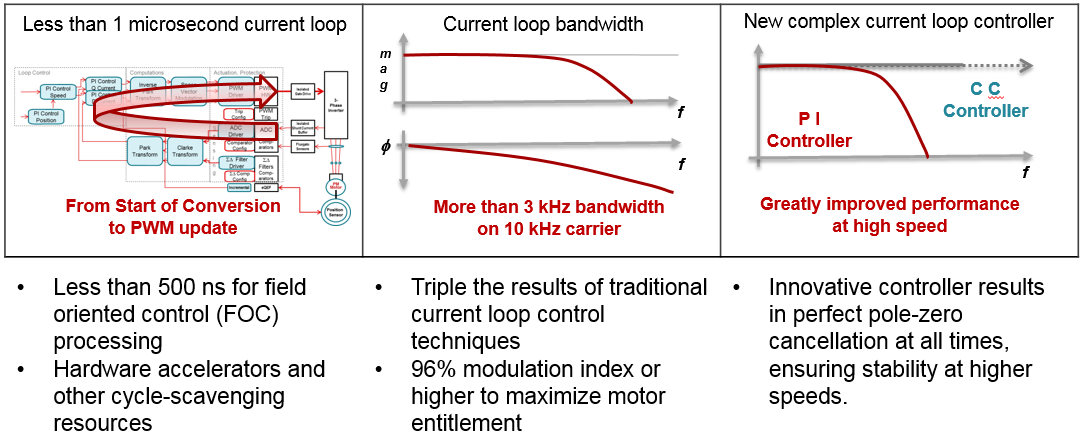
The latest advancement, Fast Current Loop (FCL), is featured in the DesignDRIVE developers kit and takes advantage of C2000 MCU’s real-time cycle-scavenging architecture, high-performance processing resources and fast data throughput to significantly increase the bandwidth of the current control loop, achieving subcycle updates of the pulse-width modulator (PWM) in less than 1 microsecond and without the assistance of external processing components like a field-programmable gate array (FPGA) or analog-to-digital controller (ADC).
In fact, the field-oriented-control (FOC) processing period, the central processing unit (CPU) time used after sampling and converting the current, is only 460 ns on a 200-MHz clock. How is this possible with an off-the-shelf MCU? It’s because C2000 MCUs are not typical MCUs. Their design from the beginning was to minimize the time (in CPU cycles) that it takes to process samples and update the actuation, which subsequent C2000 MCU generations have only improved upon. The many cycle-scavenging data-path features built into the latest C2000 MCUs include an integrated high-performance successive-approximation-register (SAR) ADC, ADC post-processing hardware, single-cycle reads from the ADC, single-cycle writes to the PWM, a trigonometric math accelerator, a code law accelerator and ePWM immediate update mode. You can even use FCL to control two axes at the same time. It’s no problem. Just move to dual-core configurations like the TMS320F28379D and use FCL on each C28x core.
Why should you care about Fast Current Loop? Because the improvements it makes to your current loop enable significant improvements to your speed and position loop control bandwidth. And improvements in these specifications on your servo drive are what your customers are really looking at. More efficient control of their factory automation equipment means more productivity, resulting in more throughput and ultimately greater profitability.
From a hardware design perspective, with FCL you can achieve greater bandwidth without increasing your carrier frequency or adding additional processing components. A higher carrier frequency means higher switching losses and additional heat dissipation, necessitating more extensive and expensive thermal-management strategies. More components mean more bill-of-material (BOM) cost, more board space, more current, etc.
Beyond the super-fast FOC processing and the resulting bandwidth improvements, FCL also includes a new, efficient control algorithm option that compensates for the inherent transport delay of the motor drive system. The DesignDRIVE Complex Controller (CC) results in perfect pole-zero cancellation at all times, ensuring stability at higher speeds than those achieved by traditional digital control algorithms.
A C2000 drive control system-on-chip like the TMS320F28379 with FCL delivers similar performance compared to FPGA-based systems while simplifying servo drive development and reducing system costs, power complexities and board space. And compared to traditional MCU-based systems, the FCL can potentially triple the drive system’s torque response and double its maximum speed without increasing the carrier frequency.
Additional Resources
- Start your development with the C2000 Delfino MCUs F28379D LaunchPad Development Kit.
- For more information on Fast Current Loop check out the white paper, A faster current loop pays off in servo motor control and the FCL training video.
- Check out the Industrial Servo Drive and AC Inverter Drive Reference Design.
- Learn more about DesignDRIVE solutions and Download the FCL project.
- Read the white paper, Designing the next generation of industrial drive and control systems.
- Read more about industrial drive control with my E2E™ Community blog series: