SSZTBE0 April 2016 FDC2214 , MSP430FR2633
Giovanni Campanella and Matthieu Chevrier co-authored this post.
Magic tricks are great for impressing friends and family; they just don’t tend to contribute to innovation among our industrial customers. Even so, at TI we have developed what sounds like a magic trick: a way to put a human hand “through” thick glass.
In process plants, operators interact daily with explosion-proof displays/controllers encapsulated in screw-on metallic enclosures with thick glass windows, like the one shown in Figure 1.
Our industrial customers struggle to find ways for plant operators to press buttons without having to open the enclosures, which can be time-consuming.

Thanks to TI capacitive-sensing technologies, operators can now interact with the controllers through the glass.
The Low Power Touch through Glass Reference Design (TIDA-00343) (Fig.1) and High Temperature Touch through Glass Reference Design (TIDA-00464) (Fig.1) each combine an electrodes board representing the operator interface and either the MSP CapTIvate™ microcontroller (MCU) development kit or FDC2214 evaluation module (EVM), which sense inputs from the operator. These all-in-one systems offer a human machine interface (HMI) solution for harsh and hazardous-area applications that can be found in field transmitters as well as field actuators.
Both the FDC2214 and CapTIvate touch technology are based on capacitive sensing (Fig.2). Capacitive sensing detects a capacitive change to a sensor element. A sensor element can be any conductive material (a copper printed-circuit-board plane, a wire, etc.) and the change can be caused by human interaction, such as the touch of a finger, ear or hand.
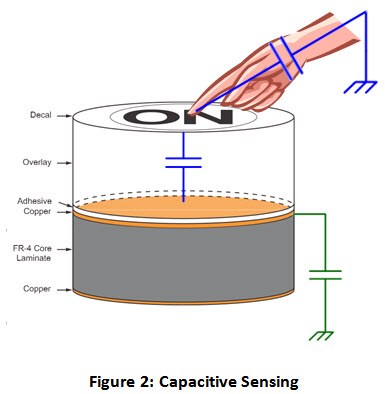
The sensor elements in both TI reference designs are copper buttons, and the change in capacitance is a human finger, perhaps even wearing a glove.
The two main challenges in designing this kind of application are:
- The metal enclosure, which pulls in the electric field, limiting the field above the glass in the desired area of interaction.
- The air gap that must exist between the glass and the electrodes in order to unscrew the enclosure without interfere with the electronics.
Because the capacitance is directly proportional to the dielectric material, it is possible to affirm that every 1mm of air gap is equivalent to 7 to 8mm of glass (the dielectric of the glass is seven to eight times more the dielectric of the air). So considering a glass thickness of 10mm and a 2mm air gap, the actual stack-up consists of approximately 25 to 30mm of glass. This will affect the sensitivity of the buttons and crosstalk between them.
Both reference designs can detect a touch event, with and without gloves, even though the electrodes board has a 1mm or 2mm air gap from the 10mm-thick glass. It has been tested that both reference designs have a probability of false events less or equal than 0.27 percent. The Low Power Touch through Glass Reference Design is targeted for low-power applications, while designers can use the High Temperature Touch through Glass Reference Design in applications where the device is exposed to temperatures up to 125°C.
Additional Resources:
- Build the Low Power Touch through Glass Reference Design:
- MSP CapTIvate MCU development kit.
- MSP CapTIvate Design Center graphical user interface (GUI).
- CapTIvate technology guide.
- Build the High Temperature Touch through Glass Reference Design:
- FDC2214 EVM.
- Sensing Solutions EVM GUI.
- FDC2214 EVM User’s Guide.
- Read “Capacitive touch in industrial HMI” blog post on Industrial Strength