SSZT825 January 2023 TLIN1022-Q1 , TLIN1024-Q1 , TLIN1029-Q1 , TLIN2022-Q1 , TLIN2029-Q1
When someone says “local network,” you may imagine the internet, a local area network (LAN), Wi-Fi® or Ethernet. While these technologies are robust and widespread, they require significant overhead – whether that’s wireless transceivers for Wi-Fi or protocol support to enable applications on the internet.
Highly integrated systems like automobiles need to support networks that require low overhead, so that they can be easily routed through the limited space inside the car. With electrical nodes distributed everywhere – and in great numbers – it’s also critical to reduce the cost per node.
To put this in perspective, enabling a Wi-Fi network across all control units in a car means putting a radio transmitter/receiver at every node; not only is that expensive, but antennas can be quite large on a board. Enabling Ethernet may not require radio transceivers at every node, but it does require at least four wires to implement the physical layer – four wires to send both low-speed engine control unit (ECU) data and high-speed video data. This speed/overhead trade-off led to the development of the two-wire Controller Area Network (CAN) and the one-wire Local Interconnect Network (LIN).
Designers favor CAN for its high speed (>5Mbps) and robustness to transmission faults. LIN is more like the single wire earth return (SWER) transmission lines used to bring internet to rural communities. To get online, these rural homes must connect to the main network; however, the distance and the cost of cabling to support these homes make a traditional transmission line economically unfeasible. In Figure 1 you can see a SWER power line using one wire to connect remote homes to the internet. SWER transmission lines are constructed to cover the last miles of areas that are too remote. That’s how LIN became known as the “the last mile network;” because in a car, LIN connects the remotely located nodes to the main network using a single wire.
 Figure 1 A SWER Transmission Line Using
a Single Wire to Connect a Rural Community to the Network
Figure 1 A SWER Transmission Line Using
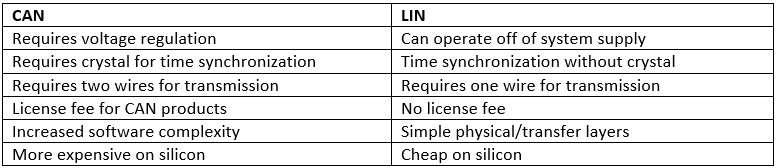
a Single Wire to Connect a Rural Community to the NetworkA typical setup inside of an automobile involves a microcontroller with a CAN/LIN gateway. The CAN delivers messages to the microcontroller, which passes those messages along the LIN bus to the remote nodes. This process is depicted in Figure 2 which shows how a radar system might communicate with a seat motor via LIN. For many modules in a car, LIN is their only contact with the network. Table 1 lists the implementation differences between CAN and LIN.
 Figure 2 Diagram Showing a Message
from a Car’s Radar Network Reaching a Remote Seat Motor via LIN
Figure 2 Diagram Showing a Message
from a Car’s Radar Network Reaching a Remote Seat Motor via LIN
|
As you can see, bringing CAN to remote nodes is a serious endeavor, likely to ramp up the cost and complexity of any project. This is where LIN as the last mile network is the best solution. Integrated LIN transceivers such as TI’s TLIN1029-Q1 and TLIN2029-Q1 enable you to take full advantage of LIN’s low-cost networking in all of your 12V and 24V applications.
Additional Resources
- To read more about automotive networks or 24V systems, check out these related articles:
- Explore TI’s portfolio of high-immunity, low-emissions, ESD-protected transceivers
- To see how LIN technology can be incorporated into today's vehicles, check out this 360 tour.
- For advanced knowledge on the electrical characteristic of LIN, read this TI application note.