SSZTCY1 May 2023 UCC5880-Q1 , UCC5881-Q1
Traction inverters are the main consumer of battery power in electric vehicles (EVs), with power levels reaching 150 kW or higher. The efficiency and performance of traction inverters directly impact an EV’s driving range on a single charge. Therefore, to build the next generation of these systems, the industry has widely adopted silicon carbide (SiC) field-effect transistors (FETs) to enable higher reliability, efficiency and power density.
The isolated gate-driver integrated circuits (ICs) shown in Figure 1 provide low- to high-voltage (input-to-output) galvanic isolation, drive the high- and low-side power stages of each phase of a SiC-based inverter, and monitor and protect the inverter against various fault conditions. Depending on the Automotive Safety Integrity Level (ASIL) functional safety requirements, the gate-driver IC may have to be International Organization for Standardization (ISO) 26262-compliant, ensuring fault detection of ≥99% and ≥90% for single and latent faults, respectively.
In this article, I’ll focus on the benefits of real-time variable gate-drive strength, a new feature that enables designers to optimize system parameters such as efficiency (which impacts EV operating range) and SiC overshoot (which impacts reliability).
 Figure 1 EV traction inverter block diagram
Figure 1 EV traction inverter block diagram| Maximize power density while eliminating external components | |
 | Learn more with the high-power, high-performance automotive SiC traction inverter reference design. |
Higher efficiency with real-time variable gate-drive strength
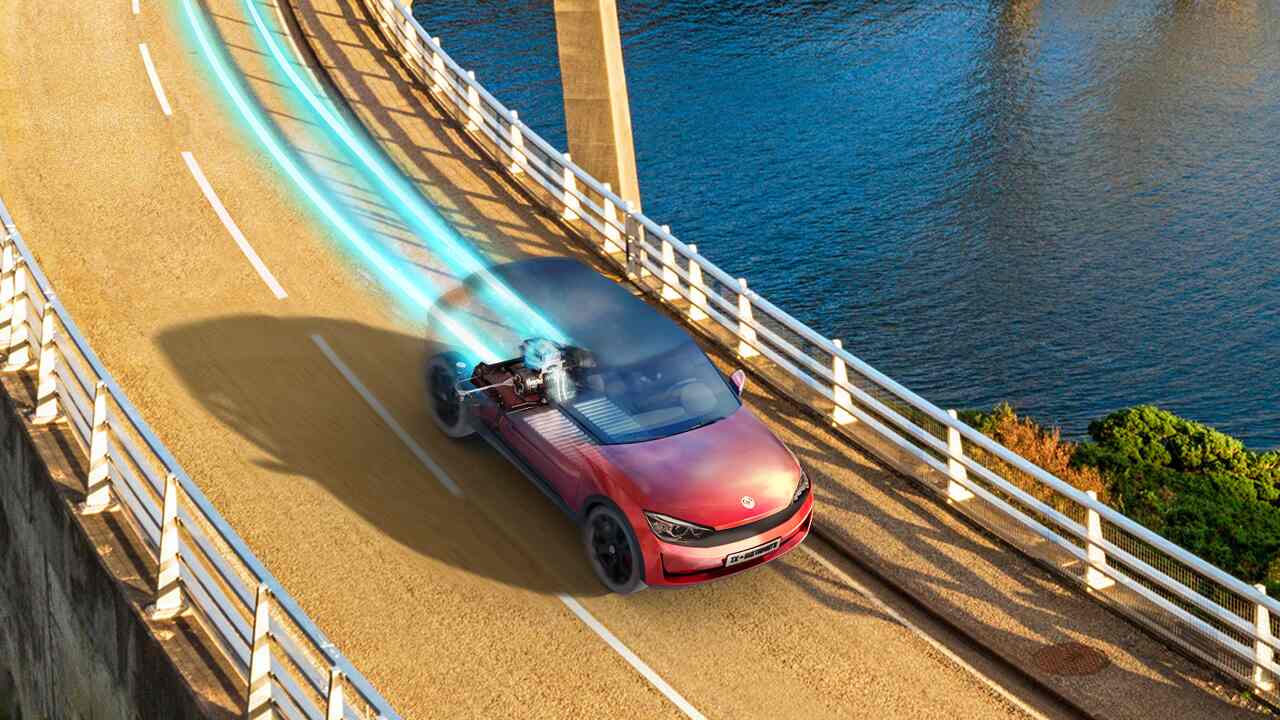
The gate-driver IC has to turn on the SiC FETs as efficiently as possible, while minimizing switching and conduction losses that include both turnon and turnoff energy. The ability to control and vary the gate-drive current strength reduces switching losses, but at the expense of increasing transient overshoot at the switch node during switching. Varying the gate-drive current controls the slew rate of the SiC FET, as shown in Figure 2.
 Figure 2 SiC slew-rate control by varying gate-driver IC drive strength
Figure 2 SiC slew-rate control by varying gate-driver IC drive strengthReal-time variability of the gate-drive current enables transient overshoot management as well as design optimization throughout the high-voltage battery energy cycle. A fully charged battery with a state of charge from 100% to 80% should use low gate-drive strength to maintain SiC voltage overshoot within the limits. As the battery charge drops from 80% to 20%, employing high gate-drive strength reduces switching losses and increases traction inverter efficiency. These scenarios are possible during 75% of the charging cycle, so the efficiency gains can be quite significant. Figure 3 illustrates a typical transient overshoot vs. battery peak voltage and state of charge.
 Figure 3 Transient overshoot vs. battery peak voltage and state of charge
Figure 3 Transient overshoot vs. battery peak voltage and state of chargeThe UCC5880-Q1 is a 20-A SiC gate driver that has advanced protection features for traction inverters in automotive applications. Its gate-drive strength varies from 5 A to 20 A, and is variable through both a 4-MHz bidirectional Serial Peripheral Interface bus or three digital input pins. Figure 4 shows the implementation through the dual split outputs that make variable gate-drive strength possible.
 Figure 4 The UCC5880-Q1’s dual-output split gate-drive structure
Figure 4 The UCC5880-Q1’s dual-output split gate-drive structureEvaluating power-stage switching with DPT
A standard way to evaluate a traction inverter’s power-stage switching performance is the double pulse test (DPT), which turns the SiC power switch on and off at different currents. Varying the switching times makes it possible to control and measure the SiC turnon and turnoff waveforms over operating conditions, thus facilitating an evaluation of efficiency and SiC overshoot, which affects reliability. Figure 5 illustrates the UCC5880-Q1 variable-strength gate driver and SiC half bridge with the low-side DPT setup.
 Figure 5 Low-side DPT block diagram
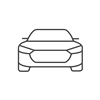
Figure 5 Low-side DPT block diagramThe results in Table 1 show how a SiC gate driver with variable strength allows you to control overshoot while maximizing efficiency and optimizing thermal performance. EON and EOFF are the turnon and turnoff switching energy losses, respectively. VDS,MAX is the maximum voltage overshoot, and the TOFF and TON transient voltages (dv/dt) are the voltage slew rates of VDS during turnon and turnoff, respectively.
 |
Mitigating overshoot
The waveforms in Figure 6 illustrate the effect of variable gate-drive strength on SiC overshoot, as the UCC5880-Q1 gate-drive resistance and drive strength are controlled in real time. Enabling the lower gate drive (SiC turnoff) mitigates the power-stage overshoot.
; SiC weak drive turnoff (b)")
; SiC weak drive turnoff (b)") Figure 6 Real-time variable gate-drive strength effect on SiC overshoot: SiC strong drive turnoff (a); SiC weak drive turnoff (b)
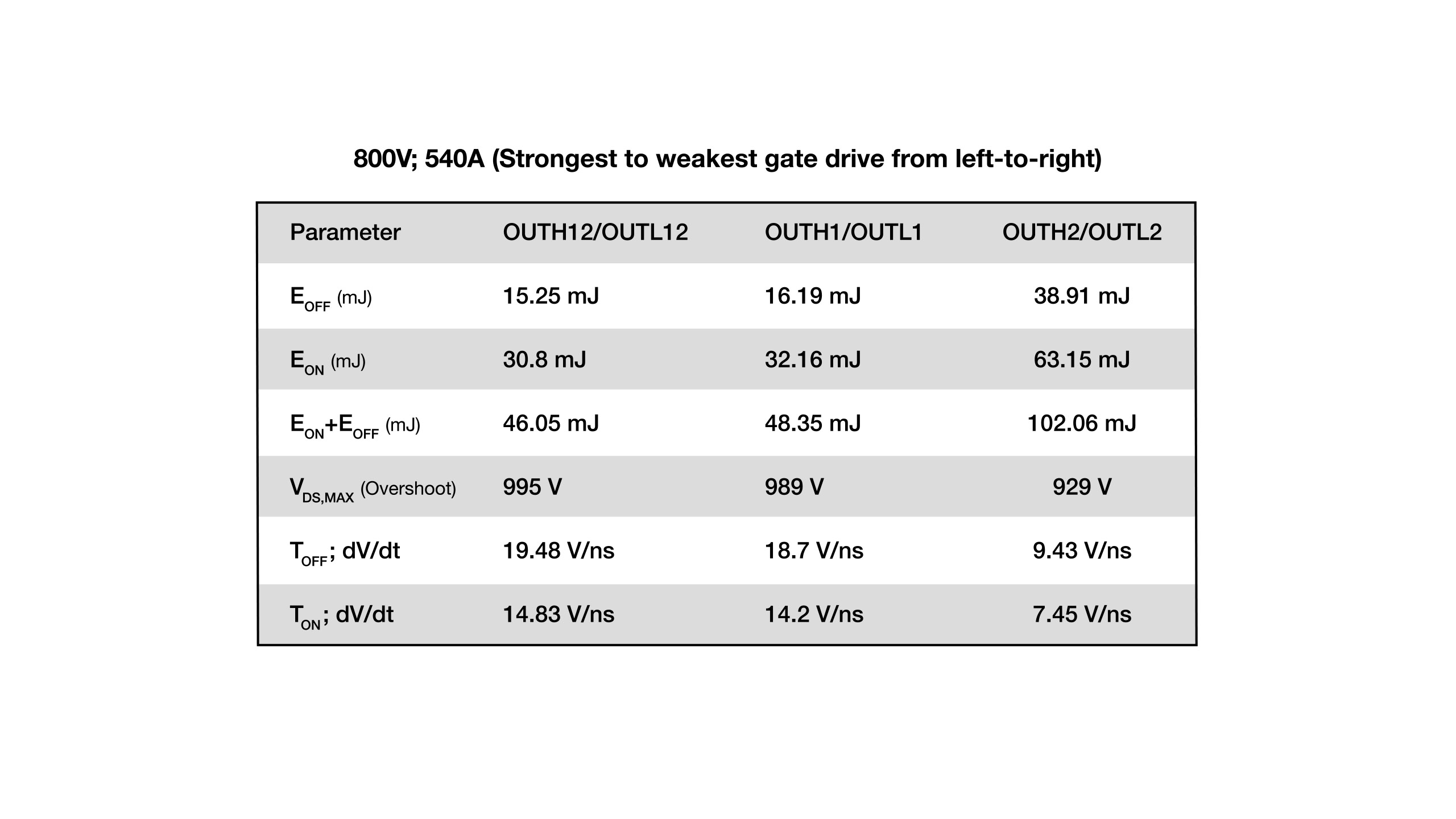
Figure 6 Real-time variable gate-drive strength effect on SiC overshoot: SiC strong drive turnoff (a); SiC weak drive turnoff (b)Table 2 lists the actual measurements for comparison. Depending on system parasitics and goals for noise control, you can trade off between the overshoot, dv/dt and switching losses accordingly.
 |
Extending driving range
When using the UCC5880-Q1’s strong gate drive to reduce SiC switching losses, the efficiency gain can be quite significant, depending on the traction inverter’s power level. While the choice in gate driver will dictate the overall efficiency of the power stage through the reduction of switching losses, the choice in gate driver bias supply can contribute by limiting conduction losses. To achieve a power-dense and high efficiency gate driver and bias supply solution, the UCC5880-Q1 pairs with the UCC14-Q1 family of devices. Modeling with the Worldwide Harmonized Light Vehicles Test Procedure (WLPT) and real drive log speed and acceleration settings,as shown in Figure 7, has shown SiC power-stage efficiency gains as high as 2%, corresponding to an additional 7 miles of range per battery, which can add up to over 1,000 miles per year for an EV user. Seven miles could mean the difference between a consumer reaching a charger versus getting stranded.
 Figure 7 WLPT and real log speed and acceleration histograms
Figure 7 WLPT and real log speed and acceleration histogramsThe UCC5880-Q1 also includes a SiC gate-voltage threshold monitoring feature that performs threshold voltage measurements at every EV key-on over a system’s lifetime, and can provide power-switch data to the microcontroller for power-switch failure prediction.
Conclusion
With EV traction inverters approaching 300-kW power levels, the need for higher reliability and higher efficiency is imperative. Selecting a SiC isolated gate driver with real-time variable gate-drive strength is useful in achieving these goals. The UCC5880-Q1 comes with design support tools including evaluation boards, user’s guides and a functional safety manual to assist you with your designs.
Additional resources
- Read the white paper, “Traction Inverters – A Driving Force Behind Vehicle Electrification.”
- See the TI E2E™ technical article, “Improving Safety in EV Traction Inverter Systems.”