SSZT853 December 2017 DRV10983-Q1 , DRV10987
In part 2 of the integrated intelligence motor driver blog post series, I discussed the open-loop acceleration phase for motor startup. In this third installment, I will discuss techniques for starting a motor from a standstill state.
The driver needs to be synchronized with rotor position before it starts open-loop blind commutation to avoid applying the voltage to wrong phase (energizing wrong phases). There are two ways to obtain this position - drive the motor to a known position (known as align and go), as shown in Figure 1; or determine the position of the rotor (known as initial position detection [IPD]) as shown in Figure 2.
 Figure 1 Phase Current During Motor
Startup with Align
Figure 1 Phase Current During Motor
Startup with Align Figure 2 Phase Current During Motor
Startup with IPD
Figure 2 Phase Current During Motor
Startup with IPDThe basis of choosing one method over the other essentially depends on the type of motor and your system requirements. Align and go is a common method used to start motors in which applying a constant voltage on the first phase drives the motor to a known position. The second phase connects to ground while the third phase can either connect to ground or remain high impedance. The important thing to consider during this state is that the motor should be completely or almost stationary so that the driver can start motor rotation without going out of sync. If the motor is not stationary, then there’s a chance that the driver can lose rotor sync and stall.
You must also consider during the align state that enough current is provided for the rotor to move from its stationary position. Current that’s too high can cause a large overshoot during the align state; current that’s too low will not be able to displace the rotor.
You will need to configure two important parameters during the align state: the align time and the current amplitude. You can optimize these parameters in an integrated driver by configuring the electrically erasable programmable read-only memory (EEPROM) register settings.
IPD is an algorithm that detects the position of the motor by applying current pulses on each phase and measuring the time interval for the pulse to reach a user-set threshold. The type of motor will affect your tuning of the duration and amplitude of the current pulse; in other words, a lower-frequency current pulse is preferable for a motor with a lower inductance and higher current amplitude, and vice versa. The main advantages of using IPD is that it can reduce the time it takes to start the motor, and avoids the backspin and vibration caused during the align state. These advantages help user transition from sensor-based commutation to sensorless, while also saving costs compared to using hall sensors.
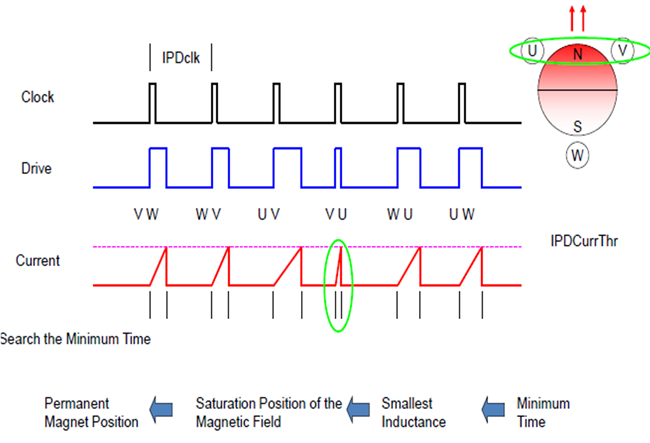
As Figure 3 Illustrates, the IPD Phase Applies Current Pulses and Measures the Time Taken for the Current to Reach a Threshold. a Pulse with a Lesser Duration Indicates a Lower Inductance, and from This You Can Estimate the Rotor Position.
Additional Resources
- Download the DRV10987 data sheet.
- Start spinning those BLDC motors with the DRV10983-Q1 evaluation module (EVM).
- Explore other training videos on a variety of topics related to designing with motor drivers.
- Read about initial position detection in this blog post, “Start your BLDC journal with motor startup (Part III): initial position detection.”
- Check out the first and second post in this blog series.