JAJA717 October 2021 DRV5032 , TMAG5170 , TMAG5231 , TMAG5273
7.1 TMAG5170 のテストの構成
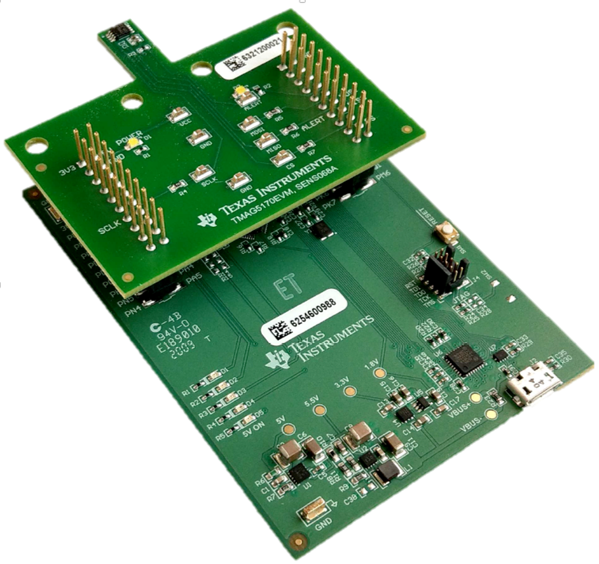
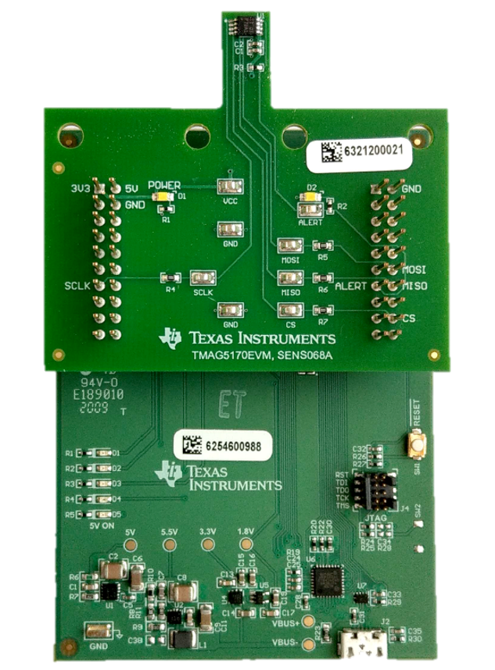
TMAG5170 のテストの構成では、図 7-1 に示す TMAG5170EVM を利用しています。このボードには、TMAG デバイスが評価用 GUI と通信するために必要な、すべての接続が搭載されています。デバイスは、基板の他の部分から絶縁されるよう、突出したカンチレバーに配置されています。この場合の測定プロセスは、DRV5032 やリード・スイッチと同じで、最初の 2 つの軸に静的なノード・ポイントがあり、3 番目の軸に偏差が発生します。
 |  |
デバイスの配置に加えて、各種の検出シナリオに対応するため、GUI でいくつかのパラメータを調整できます。このテストの目的には、次の構成パラメータが使用されます。
TMAG の設定
- 構成モード
- 変換:可能な限り高速
- すべての軸がアクティブ
- 50mT 範囲
- 大きさは X 軸と Y 軸から計算。
磁石:K&J Magnetics D4X0
- N42 の円柱型磁石
- 一定の方向
- グリッド全体を 1/4 インチ単位で移動
TMAG5170 の性質と、3 つの軸すべてについてリニア出力機能があることから、テストの実行方法はスライド式ドアの改ざんの方法とは多少異なります。磁界の方向が軸上だけでなく、平面上に配置されている場合のデバイスの応答を把握するため、磁石を特定の軸上でデバイスに近づけるだけでなく、デバイスは 45 度の角度にも配置されます。
 図 7-2 TMAG5170 の磁気接近方向
図 7-2 TMAG5170 の磁気接近方向このテストには、1 つの方向から近づくデータセットのみが含まれます。デバイスの応答と GUI からの出力に関する限り、他の 2 つの軸もほぼ同じであるためです。このテストでは、図 7-3 と図 7-4 に示すように、接近の軸は X 軸です。2 次テストは、図 7-4 に示すように X、Y 平面上で 45 度の角度により行われます。
 図 7-3 TMAG5170 の X 軸上の接近
図 7-3 TMAG5170 の X 軸上の接近 図 7-4 TMAG5170 の 45 度での接近
図 7-4 TMAG5170 の 45 度での接近